|
Обмотки многоскоростных двигателей
|
Во многих механизмах требуется изменять скорость в процессе
работы. Чаще всего для привода таких механизмов используются двигатели
постоянного тока, но в ряде случаев применяют также и асинхронные двигатели как
более дешевые и надежные.
Скольжение меняют путем включения активного сопротивления в
цепь фазного ротора. Число полюсов
обмотки можно изменить в двигателях, имеющих
обмотки, соединенные в специальные схемы. Такие двигатели называют
многоскоростными, а их
обмотки — полюсно-переключаемыми.
Переключение числа пар полюсов
обмотки асинхронного
двигателя — простой и распространенный метод регулирования, так как не
требуется дополнительного оборудования и в то же время обеспечивается работа
двигателя с достаточно высокими энергетическими показателями на разных частотах
вращения. Он широко применяется на практике, несмотря на то, что частота
вращения этим методом изменяется только ступенями.
Частота вращения двигателя при переключении его
обмотки на
разное число полюсов меняется в таком же соотношении. Изменения числа полюсов
статора можно достичь двумя способами: установкой в пазы статора двух
независимых обмоток, выполненных на разные числа полюсов, или переключением
схемы соединения катушечных групп одной обмотки.
Первый способ дает возможность получить любые соотношения
между числами полюсов и, следовательно, между частотами вращения двигателя.
Недостатком такого способа регулирования является неполное использование объема
пазов статора, так как в пазы укладываются обе обмотки, а двигатель работает
только на одной из них. Вторая обмотка в это время отключена, и занятая ею
часть объема пазов не используется. Это вызывает необходимость увеличить
размеры пазов и всего двигателя по сравнению с односкоростным той же мощности.
Второй способ изменения числа полюсов основан на изменении
направления магнитных потоков в машине путем переключения схемы обмотки. На
рис. 2.21а на поперечном сечении машины с 2р = 2 условно отображено положение
двух катушечных групп (1 и 4), принадлежащих одной фазе в двухполюсной обмотке.
Стрелками отмечено направление магнитных силовых линий потока машины.
На схеме соединения катушечных групп этой фазы также
стрелками отмечено направление обтекания их током. Причем направление стрелки
над катушечной группой вправо (1-я катушечная группа) соответствует направлению
силовых линий потока от центра, а влево (4-я катушечная группа) — к центру. При
таком соединении катушечных групп обмотка образует два полюса.
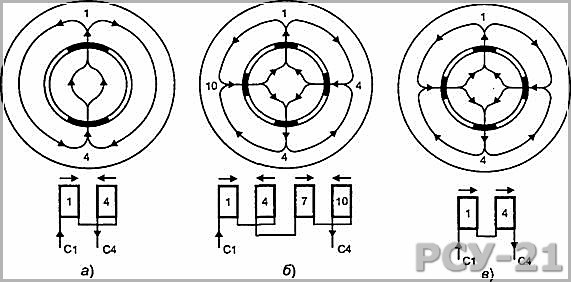
Рис. 2.21. Направление потока в магнитопроводе и условные
схемы
обмотки одной фазы машины: a — с двумя катушечными группами при 2р ~ 2; б
— с четырьмя катушечными группами при 2р = 4; в — с двумя катушечными группами
при 2р = 4
При встречном включении четырехкатушечных групп, т. е. при
принятой в обычных двухслойных обмотках схеме, обмотка образует четыре полюса:
два одной и два другой полярности. Такую же картину поля можно получить и при
двух катушках в одной фазе обмотки, если их включить не встречно, а согласно,
как отображено на рис. 2.21в. Сравнив между собой направления потоков и схемы
обмоток, видим, что изменение направления тока в одной катушечной группе фазы
двухполюсной
обмотки приводит к увеличению числа полюсов с двух до четырех, т.
е. в два раза. Если таким же образом изменить схему соединений двух (4-ю и 10-ю
или 1-ю и 7-ю) катушечных групп четырехполюснои машины, то распределение потока
будет таким же, как и в машине с 2р = 8. Таким образом, изменение направления
включения половины катушечных групп в схеме двухслойной
обмотки приводит к
увеличению числа полюсов машины в два раза.
Этот принцип используется во всех двухскоростных асинхронных
двигателях с отношением чисел полюсов 1:2, к примеру в двигателях с
переключением чисел полюсов с 2р = 2 на 2р = 4 или с 2р = 4 на 2р = 8.
В коробке выводов многоскоростных двигателей шесть зажимов,
к которым подсоединены соответствующие выводы обмоток (рис. 2.22а).
Двигатели на три и четыре скорости (частоты вращения) также
имеют две отдельные обмотки. При трех скоростях (частотах вращения) одна из
обмоток переключается с отношением чисел полюсов 1:2, а промежуточное число
полюсов получа-ют за счет второй обмотки. У четырехскоростных двигателей каждая
из двух обмоток переключается на два разных числа полюсов, к примеру, одна
обмотка — с 12 на 6 полюсов (2р = 12/6), а вторая — с 8 на 4 (2р = 8/4).
В новых сериях асинхронных двигателей применяют более
сложные схемы полюснопереключаемых обмоток, которые позволяют изменять число
полюсов и в соотношениях, отличных от 1:2. В серии 4 А вызапускаются, к примеру,
двигатели с одной полюснопереключаемой обмоткой на 2р = 4/6 или 2р = 6/8
полюсов и т. д. Количество выводных проводов и их обозначения остаются такими
же, как и в ранее рассматриваемых схемах.
.